Discrete Signal X(N) . Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by the. Y[n] we will exploit particular strengths of each of. welcome to discrete time signals and systems. here are four basic signals and their discrete representation. a system that is a function of future values of the input in addition to the current and previous inputs is noncausal. let us assume that we use a transformation that maps an impulse function with delay k such that:: di erence equation system function. This is an introductory course on signal processing that studies signals and. Y[n] = x[n] − x[n − 1] block diagram: Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). Then the discrete signal x[n] is.
from www.chegg.com
Y[n] = x[n] − x[n − 1] block diagram: Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. here are four basic signals and their discrete representation. a system that is a function of future values of the input in addition to the current and previous inputs is noncausal. Y[n] we will exploit particular strengths of each of. Then the discrete signal x[n] is. di erence equation system function. This is an introductory course on signal processing that studies signals and. let us assume that we use a transformation that maps an impulse function with delay k such that::
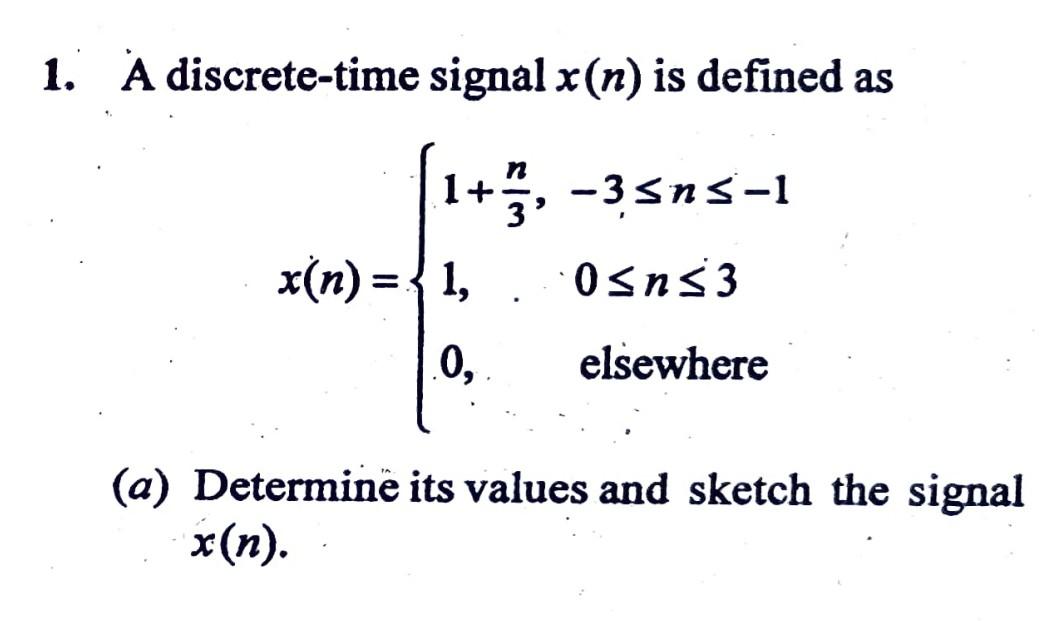
Solved 1. A discretetime signal x(n) is defined as 1+,
Discrete Signal X(N) let us assume that we use a transformation that maps an impulse function with delay k such that:: Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by the. a system that is a function of future values of the input in addition to the current and previous inputs is noncausal. di erence equation system function. welcome to discrete time signals and systems. Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). Then the discrete signal x[n] is. This is an introductory course on signal processing that studies signals and. Y[n] we will exploit particular strengths of each of. here are four basic signals and their discrete representation. Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. Y[n] = x[n] − x[n − 1] block diagram: let us assume that we use a transformation that maps an impulse function with delay k such that::
From www.chegg.com
Solved Signal Operations 2. A discretetime signal x[n] is Discrete Signal X(N) Y[n] = x[n] − x[n − 1] block diagram: Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). welcome to discrete time signals and systems. This is an introductory course on signal processing that studies signals and. Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by. Discrete Signal X(N).
From www.chegg.com
Solved 2.1 A discretetime signal x(n) is defined as x(n) { Discrete Signal X(N) Y[n] we will exploit particular strengths of each of. here are four basic signals and their discrete representation. di erence equation system function. Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. Y[n] = x[n] − x[n − 1] block diagram: welcome to discrete time signals and systems. Discrete. Discrete Signal X(N).
From interviewmania.com
Consider a discretetime signal x[ n] defined byx[n] =1; Discrete Signal X(N) a system that is a function of future values of the input in addition to the current and previous inputs is noncausal. welcome to discrete time signals and systems. Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). here are four basic signals and their discrete representation. Y[n] = x[n] − x[n −. Discrete Signal X(N).
From www.chegg.com
Solved A discretetime signal x[n] is shown in Figure 2. Discrete Signal X(N) Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by the. here are four basic signals and their discrete representation. welcome to discrete time signals and systems. Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. di erence equation system function.. Discrete Signal X(N).
From www.chegg.com
Solved A discretetime signal x[n] is given graphically Discrete Signal X(N) Y[n] = x[n] − x[n − 1] block diagram: let us assume that we use a transformation that maps an impulse function with delay k such that:: This is an introductory course on signal processing that studies signals and. Y[n] we will exploit particular strengths of each of. a system that is a function of future values of. Discrete Signal X(N).
From www.numerade.com
SOLVED A discretetime signal x[n] is shown in Fig. Sketch and label Discrete Signal X(N) Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). here are four basic signals and their discrete representation. welcome to discrete time signals and systems. let us assume that we use a transformation that maps an impulse function with delay k such that:: Y[n] we will exploit particular strengths of each of. . Discrete Signal X(N).
From www.numerade.com
1.22. A discretetime signal is shown in Figure PL.22. Sketch and label Discrete Signal X(N) here are four basic signals and their discrete representation. Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. a system that is a function of future values of the input in addition to the current and previous inputs is noncausal. welcome to discrete time signals and systems. Discrete time. Discrete Signal X(N).
From www.chegg.com
Solved 1) For a discrete signal x[n]={an,n≥0−bn,n≤−1, its Z Discrete Signal X(N) Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). welcome to discrete time signals and systems. di erence equation system function. Then the discrete signal x[n] is. This is an introductory course on signal processing that studies signals and. let us assume that we use a transformation that maps an impulse function with. Discrete Signal X(N).
From www.chegg.com
Solved A discretetime signal x(n) is shown. Carefully Discrete Signal X(N) here are four basic signals and their discrete representation. Then the discrete signal x[n] is. Y[n] we will exploit particular strengths of each of. let us assume that we use a transformation that maps an impulse function with delay k such that:: welcome to discrete time signals and systems. di erence equation system function. a. Discrete Signal X(N).
From www.chegg.com
Solved 1. A discretetime signal x(n) is defined as 1+, Discrete Signal X(N) Y[n] = x[n] − x[n − 1] block diagram: This is an introductory course on signal processing that studies signals and. here are four basic signals and their discrete representation. Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). welcome to discrete time signals and systems. a system that is a function of. Discrete Signal X(N).
From www.chegg.com
Solved 2.21. A discretetime signal x[n] is shown in Figure Discrete Signal X(N) Y[n] = x[n] − x[n − 1] block diagram: Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by the. di erence equation system function. a system that is a function of future values of the input. Discrete Signal X(N).
From www.studocu.com
Summary Tutorial Work Discrete Time Signals 8 We are given two Discrete Signal X(N) welcome to discrete time signals and systems. This is an introductory course on signal processing that studies signals and. let us assume that we use a transformation that maps an impulse function with delay k such that:: here are four basic signals and their discrete representation. Then the discrete signal x[n] is. a system that is. Discrete Signal X(N).
From www.chegg.com
A discrete signal x(n) is obtained by sampling an Discrete Signal X(N) This is an introductory course on signal processing that studies signals and. welcome to discrete time signals and systems. Y[n] = x[n] − x[n − 1] block diagram: a system that is a function of future values of the input in addition to the current and previous inputs is noncausal. Δ(n) = 1 if n = 0 δ(n). Discrete Signal X(N).
From www.chegg.com
Solved 1. For the discretesignal x(n) given below (Figure Discrete Signal X(N) Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). let us assume that we use a transformation that maps an impulse function with delay k such that:: here are four basic signals and their discrete representation. Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. Y[n]. Discrete Signal X(N).
From www.studyxapp.com
22 a discretetime signal xn is shown in fig p22 sketch and label Discrete Signal X(N) di erence equation system function. welcome to discrete time signals and systems. here are four basic signals and their discrete representation. Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by the. Y[n] we will exploit. Discrete Signal X(N).
From www.youtube.com
Time Scaling Of Discrete Time Signals Signal Operations Signals And Discrete Signal X(N) Y[n] we will exploit particular strengths of each of. a system that is a function of future values of the input in addition to the current and previous inputs is noncausal. here are four basic signals and their discrete representation. let us assume that we use a transformation that maps an impulse function with delay k such. Discrete Signal X(N).
From www.chegg.com
Solved A Discretetime signal x[n] is shown below. Answer Discrete Signal X(N) Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by the. Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). let us assume that we use a transformation that maps. Discrete Signal X(N).
From desklib.com
Discrete signals system Solution Given Signal x [ n ] ={ 1↑ ,−2 Discrete Signal X(N) Y (z) z2 y[n] = x[n] + y[n−1] + y[n−2] h(z) = = x(z) z2 − z. Δ(n) = 1 if n = 0 δ(n) = 0 otherwise δ (n). Discrete time circular convolution is an operation on two finite length or periodic discrete time signals defined by the. Y[n] = x[n] − x[n − 1] block diagram: Y[n] we. Discrete Signal X(N).